無人自動運転農機
遠隔監視下での完全無人運転の実現をめざし、さまざまな技術を活用
無人自動運転のロードマップと現在地
農業が直面するさまざまな課題を解決し、持続可能な農業を実現するためには、ロボット技術やAI、IoTを駆使するスマート農業が必要とされています。クボタは、スマート農業を発展させていく取り組みの一つとして、農機の無人化・自動化による省力化を推進しています。
農機の遠隔監視下での完全無人化という目標に向けて、クボタは衛星位置情報(GNSS)を用いた自動化を主体とした3段階のロードマップを設定し、研究開発を重ねています。現在はStep2にあたる「有人監視下での自動化・無人化」を実現したトラクタ、コンバイン、田植機の製品化を果たし、Step3の遠隔監視下での完全無人運転技術の開発に取り組んでいます。

クボタが考える農機の無人自動運転に必要な要素
クボタが考える農機の無人自動運転とは、熟練農家の実作業を農機が自動かつ無人で行うというものです。それも、ただ農作業を自動化するのではなく、熟練農家と同等の精緻な作業ができる機能をめざし、高度な技能を持たずとも、安定した作業と省力化・高効率化を実現します。
そのために重要な要素が、「自動運転・自動操舵」「人・障害物検知システム」「自動運転による農作業の精度」の3点です。クボタは、無人自動運転農機「アグリロボ」シリーズのトラクタ、田植機、コンバインにおいて、さまざまな技術を駆使しながらこの3点を実現しています。
精密な演算で安全なルートに導くMPC操舵制御技術
近年、農作業時の疲労軽減や高効率化、ムラのない高精度な作業を実現するために、作業ルートを正確に走行する「自動運転・自動操舵」技術へのニーズが高まっています。
クボタの一部のトラクタでは、操舵制御アルゴリズムの中にモデル予測制御(MPC: Model Predictive Control) を採用しています。MPCとは、制御対象の予測モデル(トラクタの運動方程式)と最適化ソルバー*1を用いて各時点での制御量を算出する制御技術です。
トラクタの操舵制御では、目標経路までの走行軌跡を推定し、最適な軌道を選択してハンドルの操舵量を決定しています(下図)。トラクタに搭載されているECU*2は、処理速度やメモリ容量といった演算リソースに制約があるため、クボタはMPCの実装において演算コストを抑える独自のアルゴリズムを開発しました。
- *1.複数の選択肢の中から最も効率的かつ効果的な解答を計算するアルゴリズム。
- *2.Electronic Control Unit。車両の電子制御を統括する小型コンピュータ。
-

目標経路までの走行軌跡を推定し(推定軌跡)、最適な軌跡を得るハンドルの操舵量をMPCモデルを使って演算出力します。
多彩な農作業への対応
トラクタは前方・後方にさまざまな作業機(インプルメント)を取り付けて多彩な作業に使用されるため、農作業ごとに操舵するための負荷や重量バランスが異なります。そこで、MPC操舵制御アルゴリズムを構築する際に、制御対象であるトラクタの車両挙動をモデル化(数式化)することで、操舵負荷や重量バランスの違いによる影響を受けないようにしています。これにより、多彩な農作業で共用できる操舵制御アルゴリズムを実現しました。
曲線経路への対応
農作業は一般的に直線経路で作業することが多いですが、ほ場の形状や傾斜によって曲線状に作業しなくてはならないケースも存在します。MPC制御では、常に進行方向の走行軌跡を推定し続け最適な操舵量を決定するため、走行中に曲率が変化する曲線経路に対しても高精度な自動走行が実現可能です。
広域な車速レンジへの対応
トラクタは、ゆっくり進むこともあれば速く移動することもあり、広域な車速レンジで使用されます。先読みを得意とするMPC制御では、目標経路までの走行軌跡や、収束に必要な時間を推定できるため、車速の影響を加味した操舵制御アルゴリズムを構築することが可能です。これによって幅広い車速でスムーズな自動操舵を行えるようになっています。
安全を確保する人・障害物検知システム
無人自動運転農機において、安全対策は欠かすことはできません。クボタの無人自動運転農機には、安全を確保するためにさまざまな技術が活用されています。
走行時の障害物や異常を検知するために、アグリロボトラクタにはレーザースキャナーと超音波ソナーが、アグリロボ田植機には8ヵ所の超音波ソナーを搭載。機体の上下左右や、前方・側方・後方で人や障害物を検知すると走行を停止するようになっています。
-

アグリロボトラクタに搭載されたレーザースキャナ(左)と超音波ソナー(右)。
また、アグリロボコンバインには安全センサとしてAIカメラとミリ波レーダーを搭載しています。収穫作業を行っている際にも、膨大なデータ量を学習したAIカメラの画像解析によって、作物の中に紛れている人や障害物を検知したり、ミリ波レーダーでほ場内の車両を検知することが可能です。検知した際には収穫作業を中断し、自動走行を停止するようになっています。
無人自動運転と高精度・高効率の農作業を両立する技術
アグリロボトラクタを用いた農作業では、耕うん、代かき、播種などの作業を行う多彩なインプルメント(作業機)を使用します。これらインプルメントで適切に農作業を行うために、国際標準規格ISOBUSに対応し、速い応答速度でのスムーズな連携を実現しています。
アグリロボ田植機では、高効率な田植え作業を実現するため、ほ場を真上から見る視点から作業マップを作成します。このマップに基づいて合理的なルート設計を行い、効率的な植え付け順序を割り出します。作業時には、クボタ独自のアルゴリズムを介した条間自動調整機能で、均等かつ美しい田植えを実現します。
-
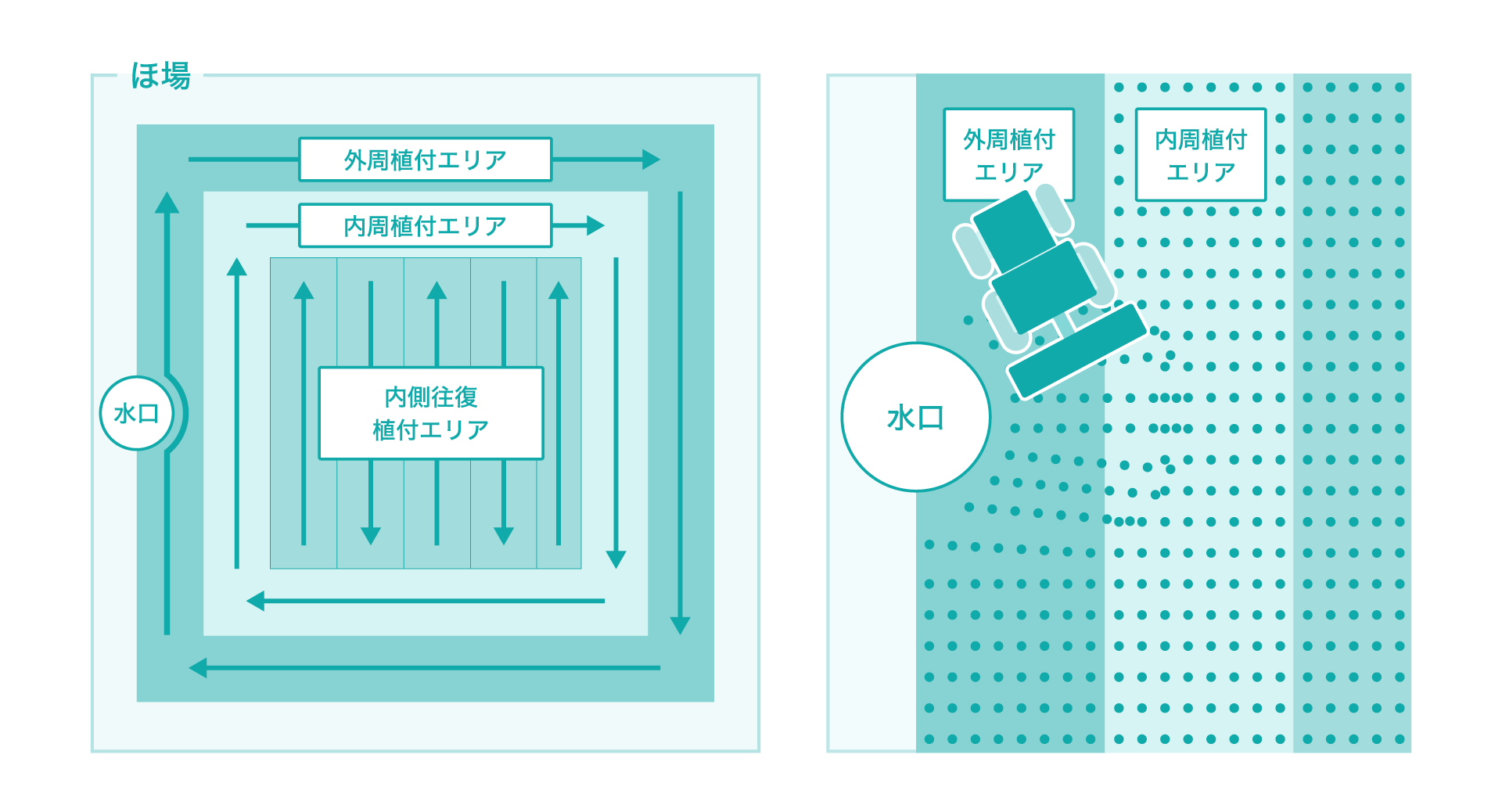
アグリロボ田植機が自動で作成する田植えルート設計イメージ(左)。水口を避け、ルートに重複部分が発生しても、作業時にはそれを踏まえて重複のない植え付け作業を自動で行います(右)。
コンバインでの収穫作業では稲や麦などの作物が倒れている場合があります。その角度が深いほど、コンバインできれいに刈り取るには熟練の技術が必要になります。アグリロボコンバインは、レーザーセンサで捉えた作物の高さに合わせ、刈り取り部やリールの高さ、車速を自動調整します。刈り取りが難しいとされる倒伏角度60度まで対応し、経験の浅い作業者でも熟練者と同様の刈り取りが可能になります。
また、アグリロボコンバインにはFMIS(精密農業システム)と連動する食味・収量センサを搭載しています。収穫と同時に水分含有率やたんぱく含有率ごとに仕分けられるため、その後の乾燥作業の効率化に貢献します。さらに、乾燥・測定データを取得してFMISと連携することで、次回(来年)の施肥設計に活用することが可能です。
Step3の実現とさらなる農作業効率化のための取り組み
クボタは、農機の無人自動運転におけるStep3実現のため、以下の課題に取り組んでいます。
- AI画像認識による障害物認識機能、周辺認識機能の充実
- 農業用高速通信インフラの整備と、通信安定性・応答性の確保
- 3Dマップの活用、すれ違い制御など道路走行技術の構築
- ほ場間を無人で走行するための農道、ほ場インフラ(標識、センサーなど)の認識
- 複数農機の遠隔監視制御、最適運行管理システムの構築
過去には、農研機構や北海道大学などとのSIP(戦略的イノベーション創造プログラム)や、北海道岩見沢市における産官学のコンソーシアムに参画し、遠隔監視・制御の開発および実証を行いながら、Step3実現をめざしています。
また、Step3実現のみならず、自動化ソリューションが少ない果樹栽培などへの無人自動運転農機の拡大や、無人自動運転農機そのもののバリエーションの拡張、Step2を実現した農機の無人化率の向上、センシングの高度化などを推進しています。これらの取り組みを通じて、より精密で効率化された農作業の実現をめざしています。
関連記事