TECHNOLOGY
アグリロボが高い精度と安全性を兼ね備えるワケビジュアルで分かる!
農機の自動運転を実現する技術
2020 . 05 . 28 / Thu

文・写真=クボタプレス編集部
自動車が危険を察知して自動でブレーキを踏む、ドライバーがハンドルから手を離した状態で公道を走る。そんなテレビCMを見たことがある人も多いのではないでしょうか。
しかし、自動運転は自動車の世界だけの話ではありません。圃場で作業を行うトラクタや田植機、コンバインなどの農業機械でも、自動・無人化に向けた研究開発・製品化が行われています。そこで今回のクボタプレスでは、この分野でも業界を牽引する、クボタの自動運転を実現する技術に注目し、わかりやすく紐解いていこうと思います。高齢化を始め、日本の農業が抱える諸問題を解決する一助となるため、完全無人化に向けて研究開発が進む自動運転農機の技術は、現在どこまで進歩しているのでしょうか?
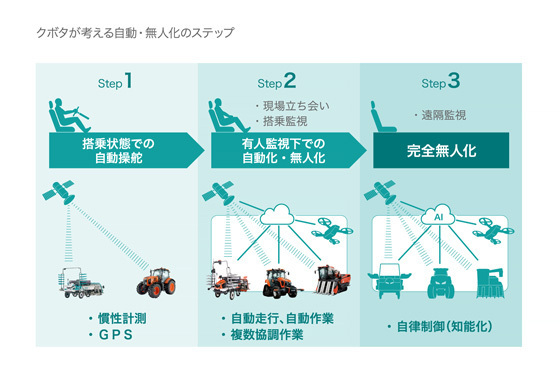
現在は有人監視下の無人運転まで実用化
下図に示す通り、クボタが考える農機の自動・無人化のステップは3段階あります。クボタはStep1に相当する直進機能付きの田植機やトラクタに加え、すでに有人監視下で自動運転・無人運転を行うStep2に相当するトラクタ、コンバイン、田植機を製品化。Step3の遠隔監視での完全無人化の実現に向けて、さらなる研究開発を進めています。
同じ自動運転であっても、農機の自動運転には、自動車の自動運転とは異なる技術が必要です。それは、両者が走行する場所の違いに起因します。
自動運転における農機特有の条件
自動運転を行う自動車は、システムが標識や信号、白線などを認識しながら走行しますが、農機が作業を行う圃場にはそういった目印はありません。したがって、自動運転農機は衛星からの位置情報だけで走行路を決める必要があります。
また、自動車は整備された道路を走るのに対し、農機は起伏や傾斜のある圃場で作業を行います。凹凸のある圃場をムダなく耕したり、余すところなく収穫を行ったりするためには、高度な車両制御技術はもちろん、車体の傾きによる位置情報のズレにも対応しなくてはなりません。

起伏のある圃場で作業を行う自動運転農機。
当然ながら、十全な安全対策も重要です。信号がない場所を走りながら、周囲に人や障害物が存在する場合はそれを検知し、衝突を防ぐ必要があります。一方で、農作物を障害物と認識させないために、農作物と障害物を見分けるセンサ技術も必要です。
このように、自動運転農機には自動車とは異なるセンサ技術や高精度の位置情報が必要となります。では、実際の製品には、どのような技術が搭載されているのでしょうか? クボタの自動運転農機シリーズ・ファームパイロットの中でも、農機の自動運転Step2を実現する高度な機能を備えたアグリロボトラクタを例に、3つの技術を紹介します。
高精度の自動運転と安全性を兼ね備えるアグリロボの技術
今回紹介するのは、「RTK-GNSSユニット」「サラウンドビュー」「人・障害物検知システム」の3つ。これらの技術によって、アグリロボが可能とする有人監視下での無人機1台による単独自動運転や、作業者1人で無人機と有人機を使用した2台協調運転作業、通常トラクタと無人機の2台同時作業が支えられています。
高精度な測位を可能にする独自開発のRTK-GNSSユニット
私たちが日常的に利用しているGPSを始め、複数の測位衛星を用いた位置計測システムをGNSSと呼びます。しかし、測位衛星のみの計測では、衛星軌道の誤差などの要因によって数メートルもの誤差が生じてしまい、精度の高い作業が求められる農作業には向きません。その誤差を減らすために用いられるのが、RTK(リアルタイムキネマチック)方式です。地上に設置した基地局からの補正情報を加え、精度の高い測位を実現します。
RTK方式の仕組み
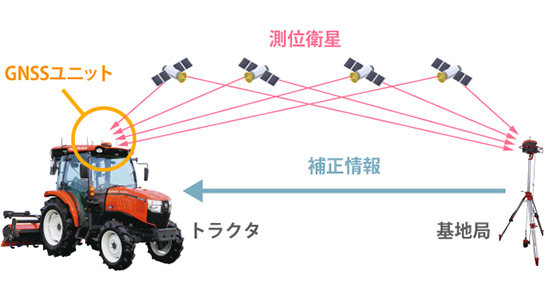
RTK方式では、測位衛星からトラクタ上部に設置されたGNSSユニットと基地局へ同時に距離情報が送られ、基地局はそれを補正情報としてトラクタに送信。トラクタは、GNSSユニットが受信した距離情報と基地局からの補正情報を比較・計算し、誤差を取り除きます。これによって、誤差数センチという精度の高い位置計測が可能になります。クボタはこの測位方式を低コストで実現する、受信機などを集約した一体型のRTK-GNSSユニットを独自開発しました。

クボタが独自に開発したRTK-GNSSユニットは、GNSSアンテナ、受信機、IMU、無線機で構成された一体型です。
また、農機は起伏や斜面の多い圃場で作業を行うため、正しい位置を測定して圃場をムラなく耕したりするには、傾斜補正が必須です。もし傾斜補正がない場合、機体が段差に乗り上げて左に傾いた際にGNSSユニットも左に傾き、機体が正しい位置と比べて左にずれた状態で計測されてしまいます。
このズレを補正するのが、RTK-GNSSユニットに搭載されたIMU(慣性計測装置)です。IMUは、加速度や角速度から機体の傾きを補正し、機体が傾いた状態でも正しい位置を正確に計算します。
傾斜補正が行われる場合と行われない場合の比較図

傾斜補正がない場合、機体が左に傾くと、トラクタ上部のGNSSユニットが左にずれるため、青いシルエットのようにトラクタが左に動いたように見えます。IMUはトラクタの傾きを計算して見かけのズレを取り除き、トラクタの正確な位置を導き出します。
こうした技術を組み合わせることで、凹凸の多い圃場でも誤差数センチの精度で自動運転が可能になります。精度の高い測位に基づいて自動運転を行うため、高精度の作業が可能となり、作業負担が軽減されます。
無人機+有人機の2台同時作業を可能にするサラウンドビュー
サラウンドビューは、トラクタの前後左右に取り付けられたカメラの映像を合成して俯瞰映像を作り出し、機体の周囲360度を分かりやすく表示する技術です。これを用いて、無人運転時の周囲監視を行います。
トラクタに設置されたカメラと撮影範囲
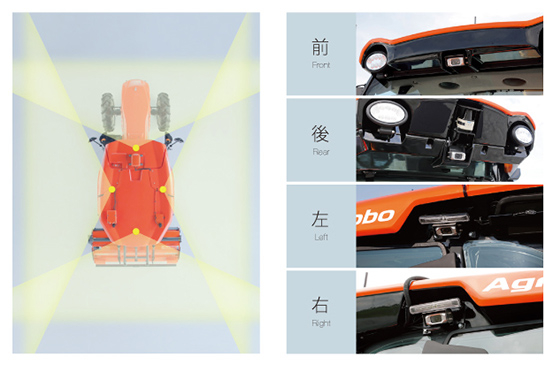
具体的には、トラクタキャビンの前後左右に装備された計4つの超広角カメラで全方向を撮影。これらの映像を、ソフトウェアによって俯瞰した映像に変換し、自然に見えるように合成します。この映像に、トラクタを真上から見た画像を重ねて、サラウンドビュー映像が完成します。
このサラウンドビュー映像を無線で送信することで、タブレットや、有人機に装備している監視モニターで確認することが可能。有人機で作業を行いながら、同時に稼働している無人機の安全を確保します。

監視モニター(左)やタブレット(右)に、作成されたサラウンドビュー映像が表示されます。
2種類のセンサが組み合わせられた人・障害物検知システム
機体周囲の人や障害物を検知するために、アグリロボトラクタはレーザースキャナーと超音波ソナーの2種類のセンサを搭載しています。

レーザースキャナー(左)、超音波ソナー(右)。
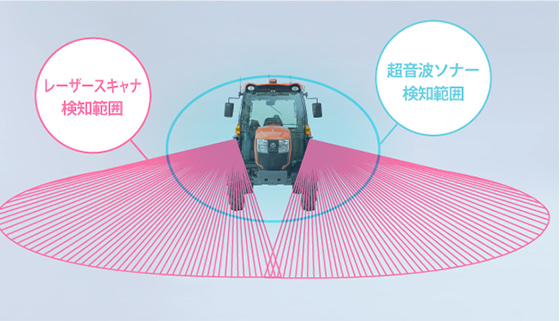
キャビン前方左右に2基、後方に1基搭載されたレーザースキャナーは、レーザー光線を広く扇形に発射し、障害物に当たって跳ね返ってくるまでの時間によって、障害物までの距離を計測します。
上から見たレーザースキャナーの検知範囲

遠くまで届くレーザー光線は中~遠距離の障害物監視に力を発揮しますが、扇形の平面で発射されるため、平面の上下に障害物を検知できないエリアができてしまいます。
正面から見たレーザースキャナーの検知範囲

これを補うのが、機体に合計8基搭載された超音波ソナーです。上下も含め、広く拡散する超音波を用いて、主に近距離の人・障害物を検知します。
レーザースキャナーの検知範囲と超音波ソナーの検知範囲
異なる守備範囲を持つ2種類のセンサを用いることで、機体周辺を近距離から遠距離、上下左右の広い範囲で、人や障害物を検知することが可能に。これによって、圃場内の障害物を検知して停止したり、自動運転の誤発進を防いだりしているのです。
完全無人化に向けて高まる期待
2020年、クボタはStep2に相当する、直進に加えて旋回時の自動運転も可能な、業界初の自動運転田植機の投入を予定しています。新たに加わるアグリロボ田植機には、操作や注意ポイントを音声でガイドするボイスアラームが搭載されるなど、自動運転農機による一貫作業体系の実現に向けたICTやロボット技術の発展に期待は高まります。
では、完全無人化の実現に向けて、今後必要な技術はどのようなものなのでしょうか。
トラクタ技術第一部の新海敦さんは、以下のように語ってくれました。「現在の自動運転トラクタは、人がトラクタに乗車して作業する場合に比べ、機能上と安全上の理由からさまざまな制約があり、比較的平均的な状況での使用に限られます。今後自動運転農機がより一般化していくためには、普通の機械が当たり前にできることを、自動運転でも当たり前にできるようにしていかなくてはなりません。そのためにはより厳しい環境下でも安定して走行し、安全を十分に確保できる技術を発展させていかないといけないと考えます。自動運転農機の普及にはさまざまな技術が必要ですが、その中でも、どんな厳しい状況でも安全を確保するためには、AIカメラの技術の活用が重要になってくると思います」。
多彩な技術を駆使して、農機の完全無人化の実現を目指しているクボタ。技術開発によって、今後もさらなる発展が見込まれます。
編集後記
国内農業は、高齢化に伴う離農や農地委託、担い手農家の人手不足への対応や作業効率の向上、省力化など、さまざまな課題を抱えています。自動運転農機において、クボタがさまざまな技術を駆使して農業の抱える課題をひとつでも解決し、農業を魅力ある強いビジネスに成長させようとしていることが感じられました。Step3の遠隔監視での無人運転の実現に向けて、さらなる研究開発を重ね、進化を重ねていくクボタの自動運転農機から今後も目が離せません。

