新しい田植えで美しい植え付けを実現するAgri Robo田植機
田植機




食糧自給率の低下、農業人口の減少、農業従事者の高齢化など、日本の農業には多くの課題が存在します。クボタは農業の現場に寄り添い、農業機械の研究開発を通して数々の課題解決に取り組んできました。田植え技術を自動化するのは難しいと言われるなか、業界初となる搭乗せずに自動運転ができる「Agri Robo田植機」を製品化したのです。「美しく植える」という日本の田植えの伝統を大切にしながら、省力化・省人化につながる「全面匠植え」を実現しました。スマート農業へまた一歩前進したAgri Robo田植機の開発を足掛かりに、クボタはさらなる技術の向上をめざします。
日本の「田植え」を変えたい
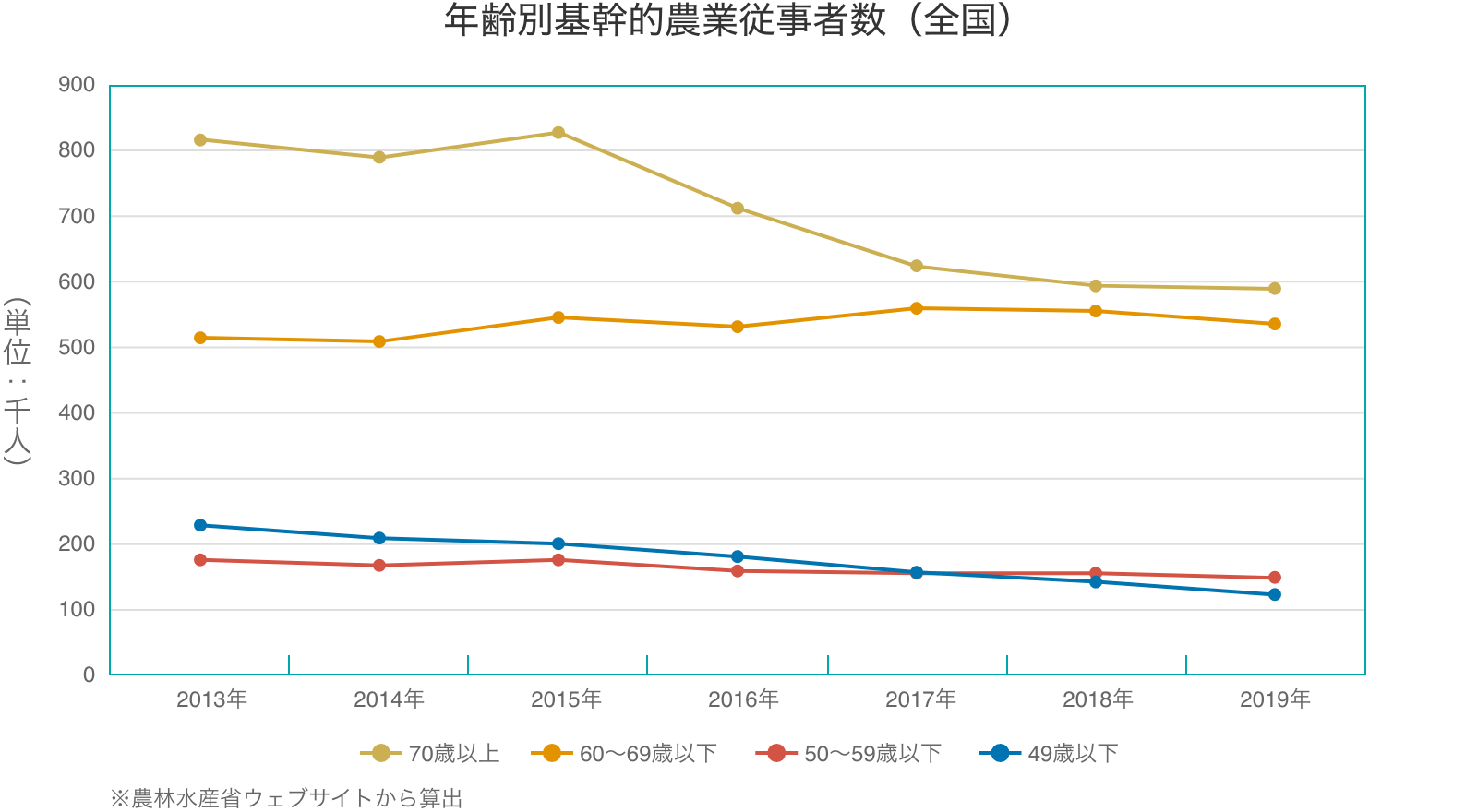
近年、国内においては少子高齢化による労働力の減少が社会問題として叫ばれており、農業も例外ではありません。特に田植え作業は、稲の生育を揃えるために植え付けを短期間で行う必要があり、苗の運搬や補給など大人数で取り組まなければならず、人手不足に直面しています。高齢化による離農、新規就農者の減少などから担い手の農地割合が急増し、農業従事者の作業負担が増加の一途をたどっているのが現状です。一度植えてしまうとやり直しが効かない田植えは、初心者には難しく、熟練技術が必要な田植機の自動化を求める声はかねてより挙がっていました。クボタは、そうした農業の現場の声を受け、誰でも簡単に美しい植え付けができ、省力化・省人化に貢献する自動運転の田植機の開発に着手しました。
鳥の視点でほ場をとらえる
田植機をはじめ、クボタは数々の農業機械の開発に力を注いできました。脈々と受け継がれてきた技術をベースに、常に新しい技術を取り入れて農業の機械化を推し進めたのです。農業の歴史とともに歩んできたクボタだからこそ、いくつものステップを乗り越え、約2年という短い開発期間で、田植機の自動運転化を成し遂げることができました。
自動運転で美しい植え付けをできないだろうか。従来から農家が抱えていた田植え作業の負担を軽減し、日本の伝統である美しく植えることを実現するべく、若手を中心に未来を切り開くメンバーが集められました。自動運転を実現するためのシステム開発、田植機がほ場を走る際の操舵技術、無人化における安全性の担保と、あらゆる要求事項を最終的に実現する設計開発をそれぞれが担ったのです。

苗を重なることなく等間隔に植えることができれば、苗の無駄もなく、稲の生育も揃います。また、美しく植え付けることは日本の田植えの伝統です。ただ、熟練者が行うような美しい植え付けは、単に田植機を自動運転にするだけでは実現しません。直線の植え付け、障害物の検知、ほ場のマップや植え付けルートの作成などいくつもの機能が必要になります。
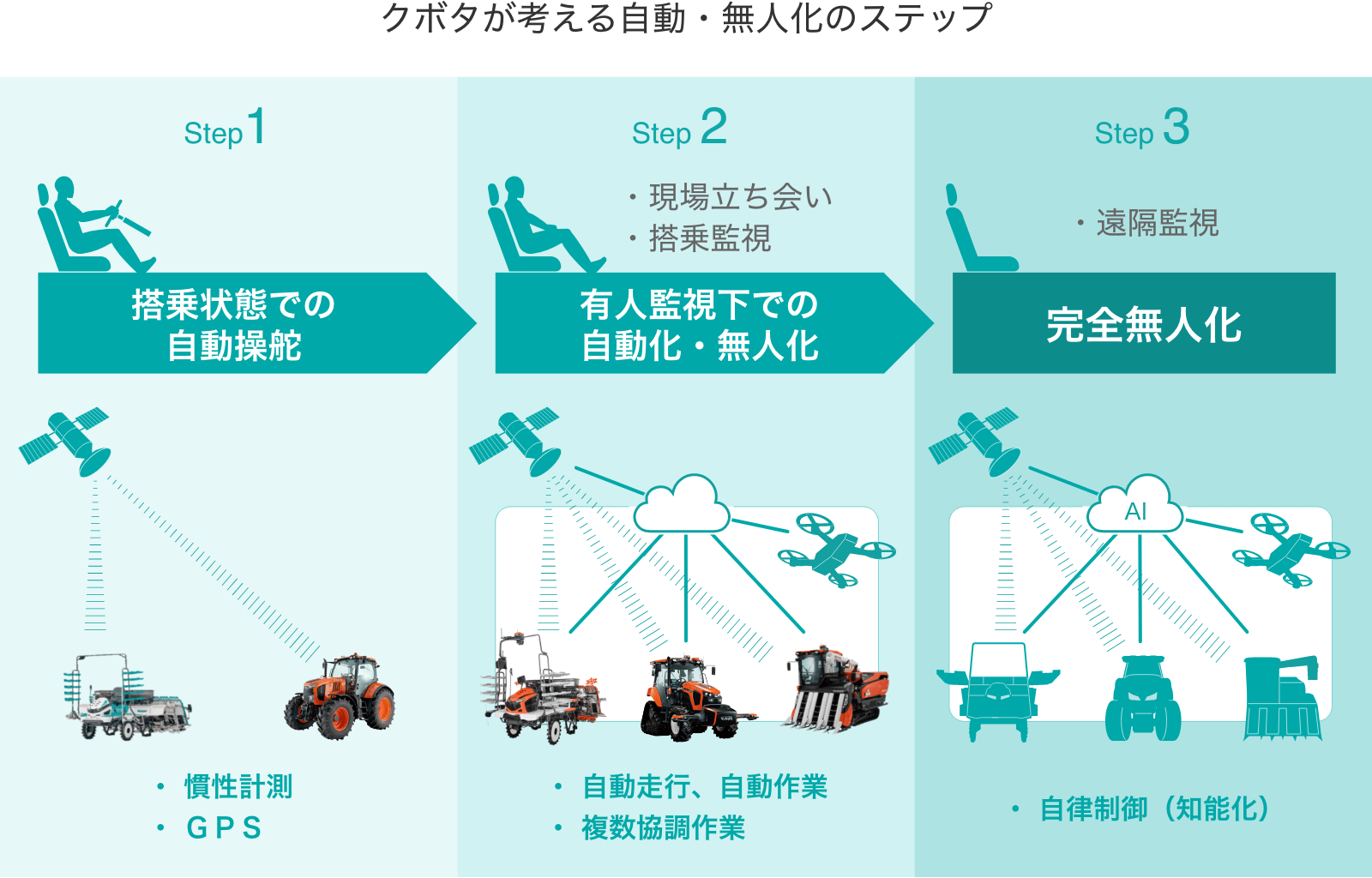
クボタが考える自動・無人化農機の開発は3つのステップで進められており、今回の業界初となる未搭乗での操作が可能な自動運転田植機の開発でStep2の達成となります。Step2では自動運転での旋回に加え、無人でも安全に走行できるように問題点の洗い出しと対策をいくつも講じることで、自動運転で美しく植え付ける技術を確立。クボタでは、ほ場の隅から隅まで苗を均等に植え付けるこの機能を「全面匠植え」と名付け、これによって熟練者のような美しい植え付けを、誰でも簡単にできるようになりました。
「全面匠植え」が実現できたポイントは、ほ場を見る視点を横から上に変えたことにあります。これまで人が行う植え付けでは、目の前に広がるほ場を農作業する人間の目線、すなわち横から見て、出入り口の反対側から順に植え付けていました。しかし、Agri Robo田植機は、空を飛ぶ鳥のようにほ場を真上から見る視点で全体をマップとして捉え、合理的なルート設計を割り出す頭脳とGPSによる位置情報を組み合わせて、効率的な植え付け順序を割り出すのです。
人が田植機を操縦して田植えを行うときは、「往復植え付け」と「外周植え付け」の2行程で、外周植え付け分の隙間が空くように「往復植え付け」を繰り返し、外周植え付けをして作業を終えます。人による植え付けの場合、苗を重ねて植え付けてしまったり、スペースが空いたりして、美しい植え付けにならない場合があります。一方、Agri Robo田植機が生成するルートは人間とは異なり、「往復植え付け」、「外周植え付け」に加え、「内周植え付け」の3つの行程から構成されます。このルートは人による植え付けとは違い、条間*1調整などを行い、スペースが余らないように作成されたもので、さらに苗の補給や出入り口の位置まで加味された理想的なものです。
- *1.苗を植え付けた列と列の間隔
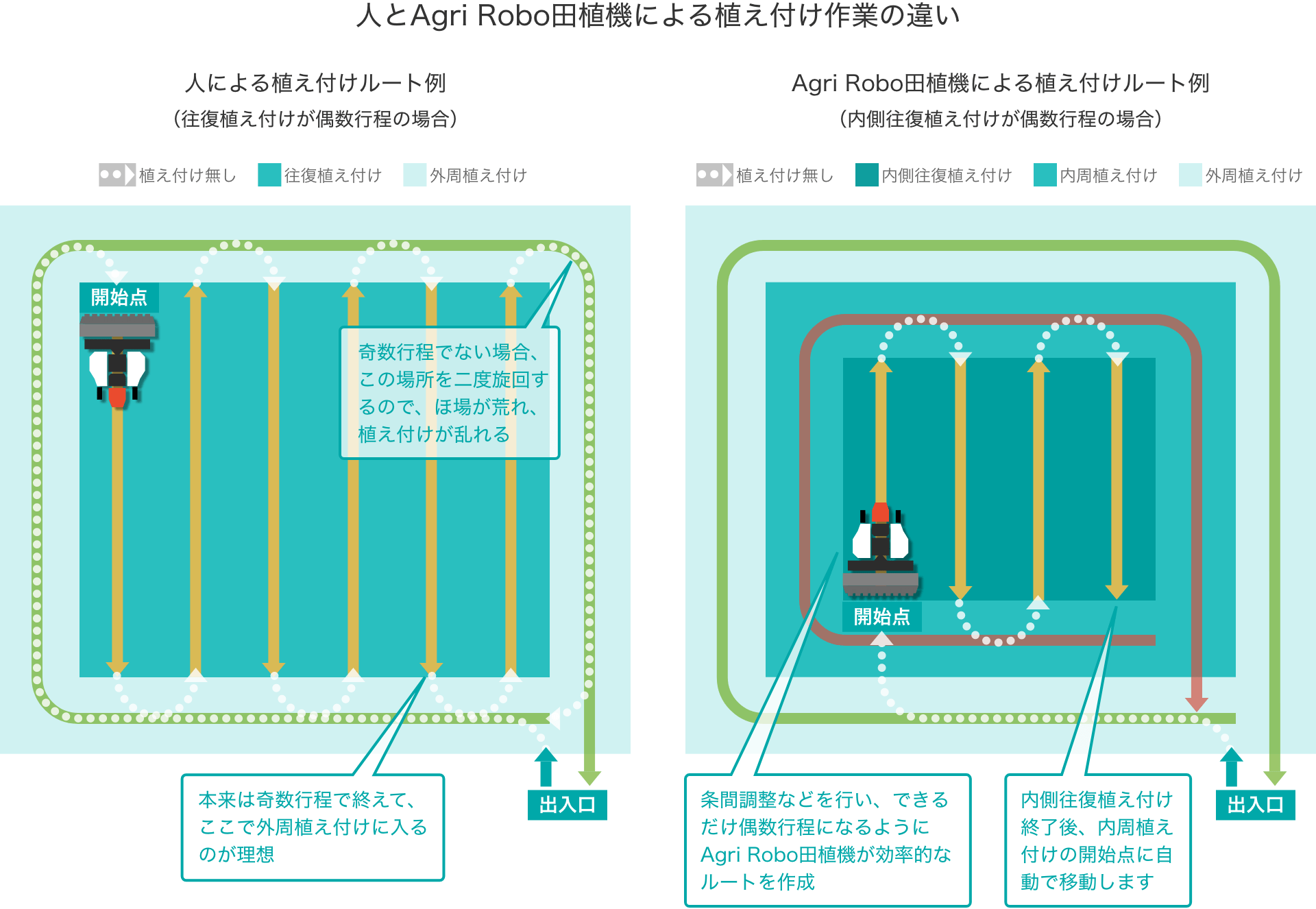
人による「往復植え付け」は出入口の対角線上から植え付けを開始し、奇数行程で終えてから外周植え付けに入るのが理想です。しかし、上の図のようにほ場の状態によっては偶数行程で往復植え付けを行う必要があります。その場合、図の右上の部分で二度旋回する必要があるため、ほ場が荒れ、植え付けが乱れる原因となっていました。
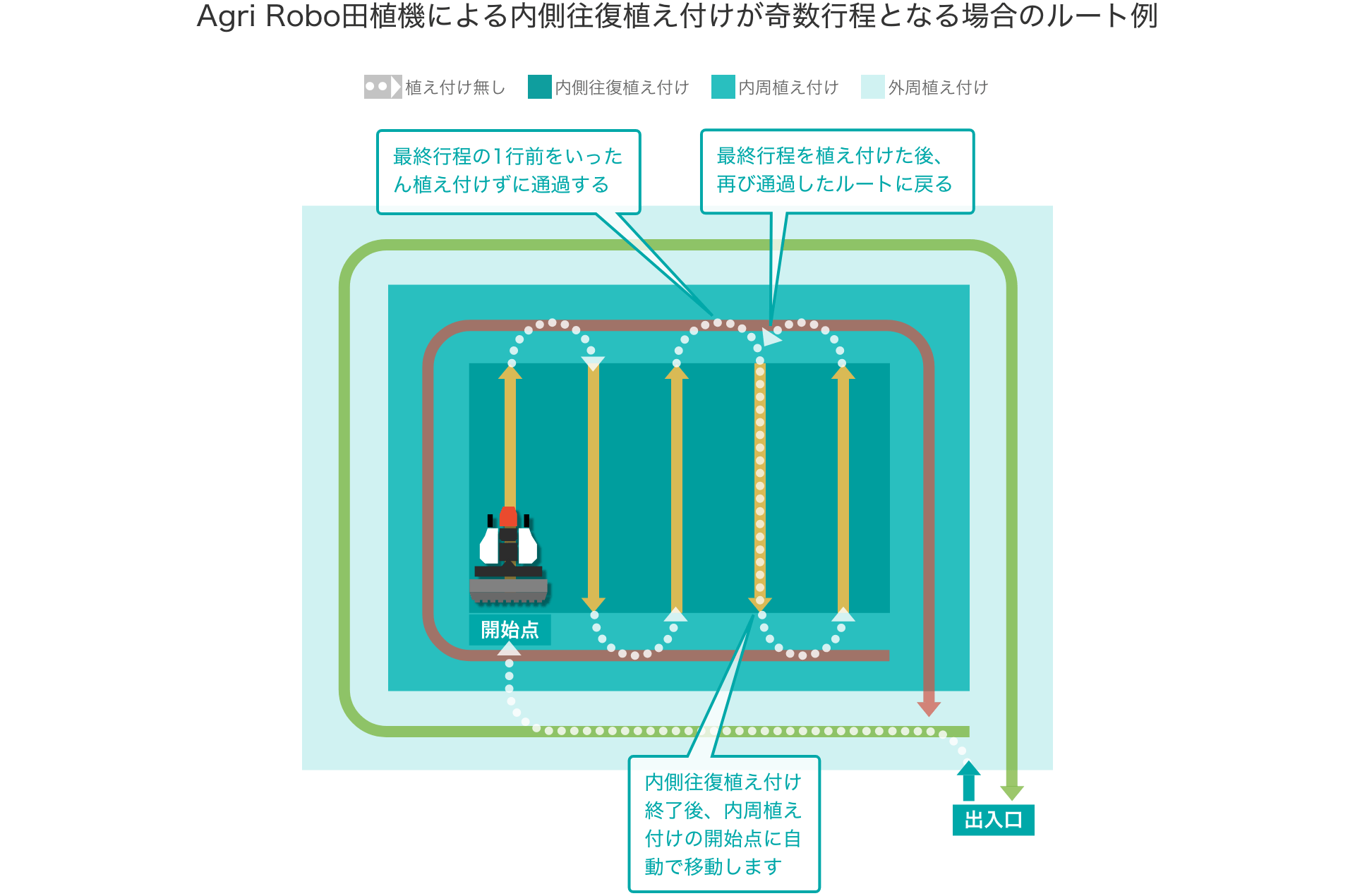
しかし、Agri Robo田植機は条間調整などを行い、スペースが余らないように、かつできるだけ偶数行程で「内側往復植え付け」を行うルートを作成するため、ほ場の荒れを最小限にすることができます。しかし、ほ場の状態によってはどうしても「内側往復植え付け」が奇数行程になってしまう場合があります。これを解決するのが「植え付け無し行程」というアルゴリズムです。
これは「内側往復植え付け」が奇数行程となった場合、最終行程の1行程前をいったん何も植え付けずに通過し、次の最終行程を植え付けた後、再び何も植え付けずに通過したルートに戻る方法です。この植え付けは、いままで人が行っていたものとはまったく異なる新しい方法でした。ほ場を俯瞰して全体をマップとして捉えるAgri Robo田植機だからこそ実現できるこの合理的な対応方法は、技術者のあいだでも驚きの声があがりました。
ほ場の隅から隅まで圧倒的な美しさを追求
「全面匠植え」が実現するまでには、多くの困難を要しました。なぜなら、ほ場と一口に言ってもきれいな四角形だけではなくさまざまな大きさや形状があり、またほ場を囲むあぜや水口(みなくち)*2など、不規則な部位がまっすぐに植える作業の障害となってくるのです。この課題を解決するにあたって、大きなポイントとなるのはマップ作成、制御、安全への対応の3つです。
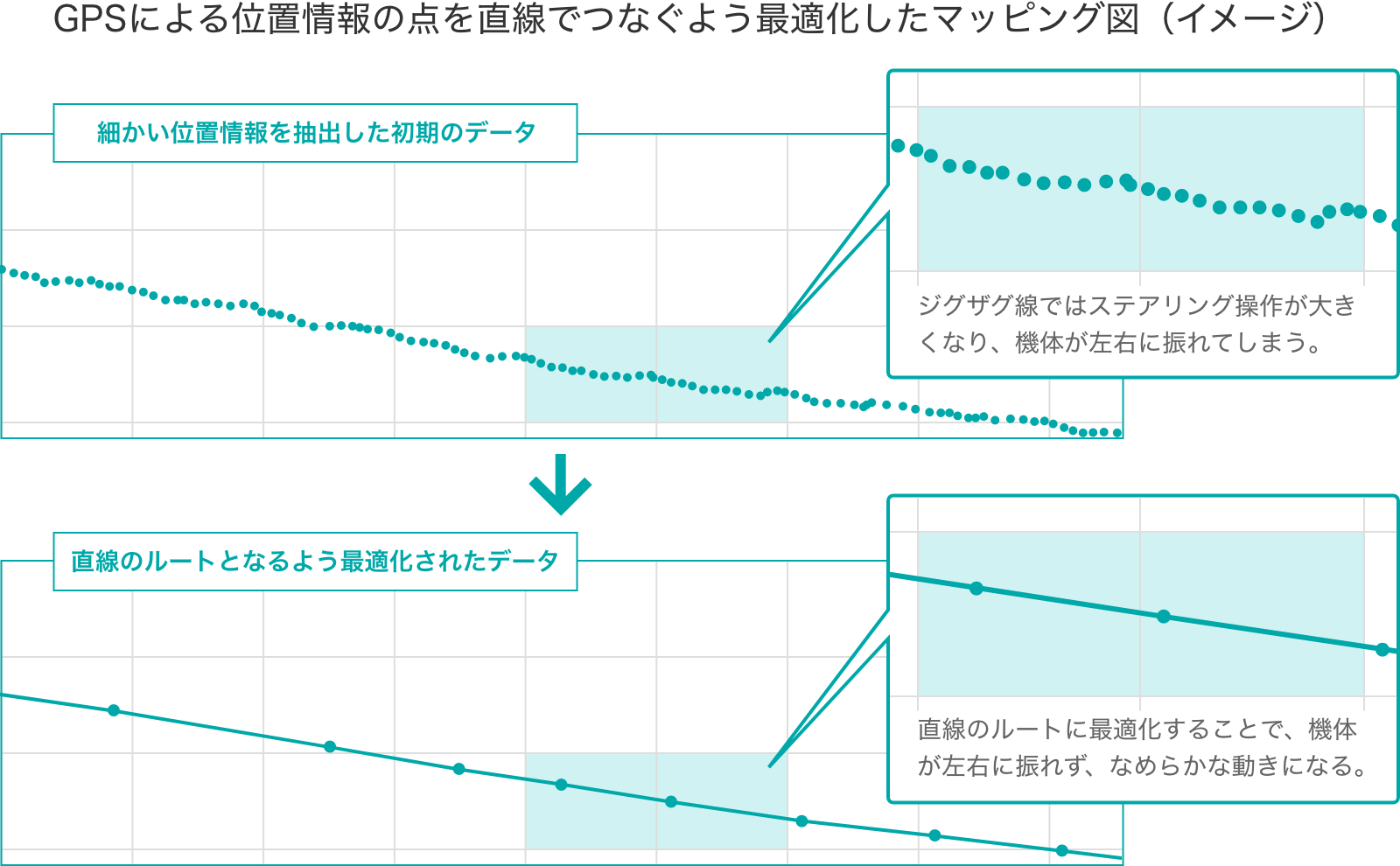
とりわけ、ほ場のマップを作成する「マッピング機能」は、ほ場の外周の大きさや形状を正確に捉えるうえで、より高度な技術が求められました。GPSを通じて取得した点の位置情報から必要な点を抽出し、外周のルートを作成します。数十センチ間隔でプロットするGPSの位置情報の点をそのままつなぎ合わせると、ジグザグになります。そのジグザグ線のとおりに田植機が自動操舵するとステアリング操作が大きくなり、機体が左右に大きく振れてしまうのです。この状態では操舵の安全性はもちろん、植え付けも乱れてしまいます。そこで田植機が直線的に動けるよう位置情報を最適に処理し、機体が左右に振れることなく美しい植え付けの基本となるなめらかな動きとなるよう最適化を図りました。
- *2.水田における水の取り入れ口
水口などの障害物がある場合、Agri Robo田植機はその障害物を避けつつ苗が重複しない植え付けを行うためのルート作成を行います。障害物を避けるためには外周植え付けの際に大きく迂回する必要がありますが、その迂回するルートを想定し、何もしなければ重なってしまう内周植え付け時の植え付け部分をあらかじめ空けておきます。こうして不必要に苗が重なることなく植え付け作業を行えるのです。また、障害物検知や自動運転エリアの逸脱時に自動停止するセーフティー・ストップといったAgri Robo田植機の制御機能にも注力しました。クボタが培ってきた制御技術、そして農家の使いやすさを追求して細かな工夫を盛り込むことで、安全に美しい植え付けをするAgri Robo田植機の完成に至ったのです。
-

水口に見立てた黄色いポールで設けられた障害物を回避して植え付けられるよう、内周(黄色い点線)植え付けの際にあらかじめ2条分を植えずに空けておき、外周植え付け(ピンクの点線)時にきれいな曲線を描きながら植え付けていきます。
田植機から日本の農業を次のステージへ
田植機の自動運転を実現したクボタ。さらに次のステージへと挑戦は続きます。日本にあるほ場の形状はさまざまで、複雑な形状も少なくありません。どんなほ場であっても対応し、自動で美しい植え付けすることで日本の田植えを進化させたい。そのために、試行錯誤の日々は続きます。国土の小さな日本は地形も複雑で、ほ場も工夫して作られています。一つひとつのほ場、そして一人ひとりの農家に寄り添い対応していくことは、農業のすそ野を広げることにつながります。これからの農業を切り開くために、クボタは日本の農業の伝統を守りながら研究開発の歩みを進めていきます。

