熟練者の技を最新技術で再現。未来の農業を実現する無人自動運転コンバイン
コンバイン・バインダー・ハーベスタ




2050年までに世界人口は97億人に達すると言われており、将来的に深刻な食料不足が懸念されています。これまで、クボタは食を支える農業のさまざまな課題解決に貢献してきました。近年の世界的な食料問題を解決するため、クボタはトラクタ・田植機に続き、世界初*の無人自動運転が可能なコンバインを開発。クボタが考える持続可能な未来の農業の実現に向け、着実に歩みを進めます。
- 2023年6月14日現在、クボタ調べ
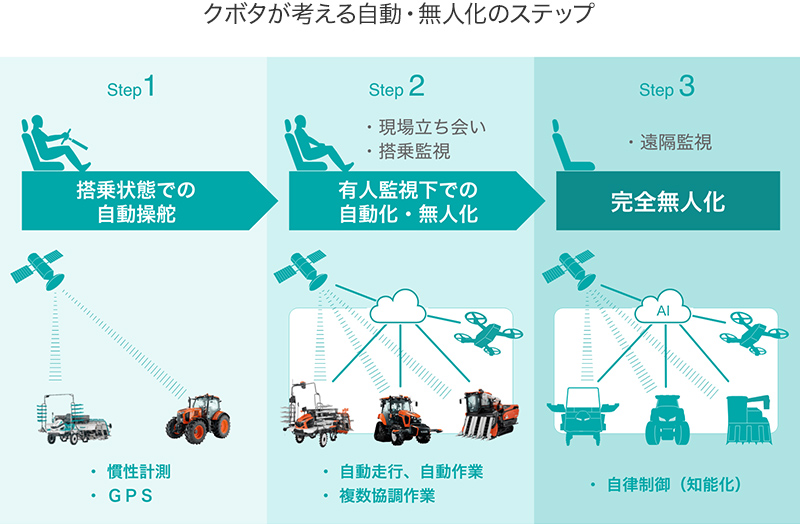
クボタがめざす持続可能な農業。実現のカギを握る完全無人化
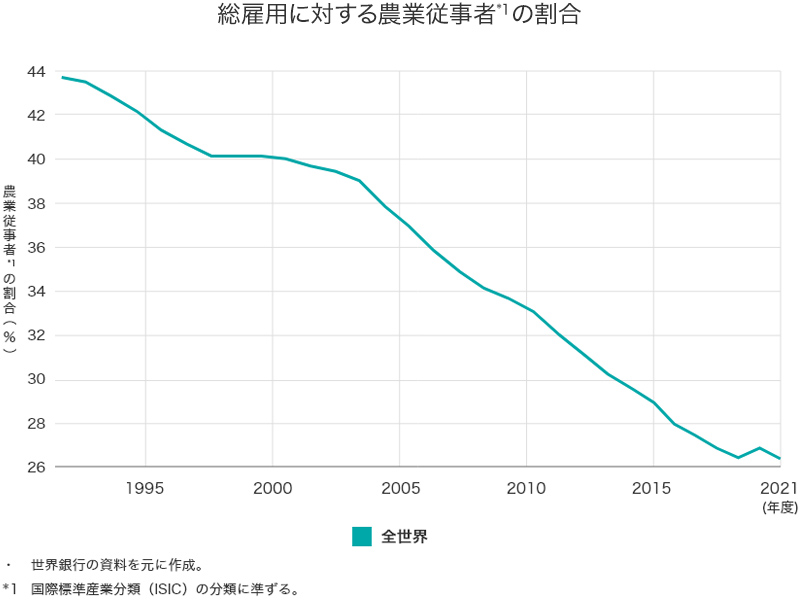
世界的な食料需要の増加に反比例して、農業従事者の数は年々減り続けており、高齢化も進んでいます。一人あたりの経営耕地面積は拡大し、農家がやるべき仕事は増している中、食料供給量を増やすためには農作業の省力化、省人化が求められています。
「これからも農業は続けていかなければならない」
クボタはその思いを胸に将来的に懸念されている世界的な食料不足などの問題に対して、さまざまな製品・サービスを開発してきました。
さらにクボタがめざすのは、人にも地球にも負荷をかけず、農作物の収量・品質ともに向上させる持続可能な農業です。その一端を担うのが農業の完全無人化を可能にする農業機械。クボタは農業の未来を見据え、農業機械の開発に取り組んでいます。
コンバインの無人化・自動化はなぜ難しいのか
「耕す・植える・刈り取る」という基本的な農作業を担うトラクタ・田植機・コンバイン。クボタはこれまでに無人自動運転機能を搭載したトラクタと田植機を開発しました。しかし、その最後となるコンバインの無人自動運転化には大きな課題がありました。
土を耕すトラクタ、苗を植える田植機と比較すると、コンバインはクリアしなければならない課題がさらに無数にありました。まず、作物とその他の障害物を見分けなければならないこと。次に、さまざまな種類の作物に合わせた刈り取りが必要なこと。そして、その作物も倒伏している場合があるなど、常に同じ状態ではないこと。これらの作業を無人化・自動化するためには、熟練者の技術をコンバインの動作に反映させる必要がありました。
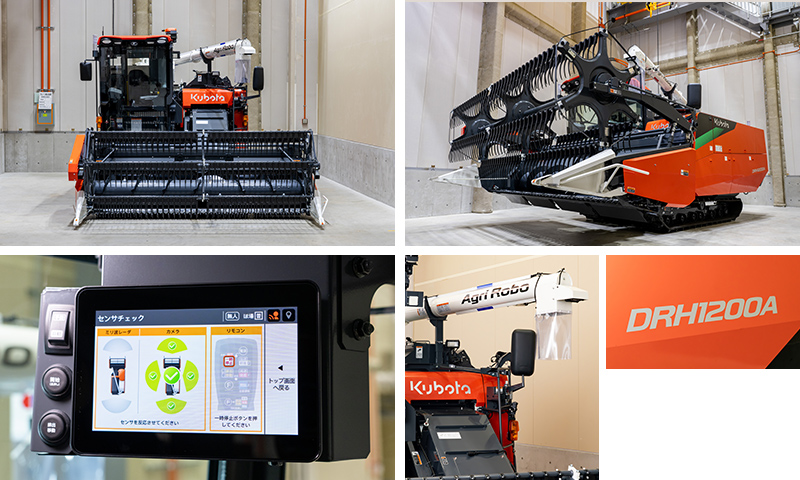
「熟練者と同じ作業を自動化・無人化するコンバイン」というコンセプトで開発を続け、2024年世界初となる有人監視下での自動運転を可能にしたアグリロボコンバインDRH1200Aを発売。こうして無人自動運転できるトラクタ・田植機・コンバインが出揃い、スマート農業一貫体系が実現しました。難度の高いコンバインの無人自動運転をクボタがどのように実現したのか? その開発の背景、エピソードをご紹介します。
「作物か? 人か? 障害物か?」熟練者の判断をコンバインで実現
コンバインの自動運転化に向けて大きな課題のひとつであったのが、「人と作物、障害物を見分ける技術」です。熟練者はこれまでの経験を基にほ場の状況を的確に判断して機械を操作します。そのために、まず熟練者と同じ判断ができる機能が必要でした。
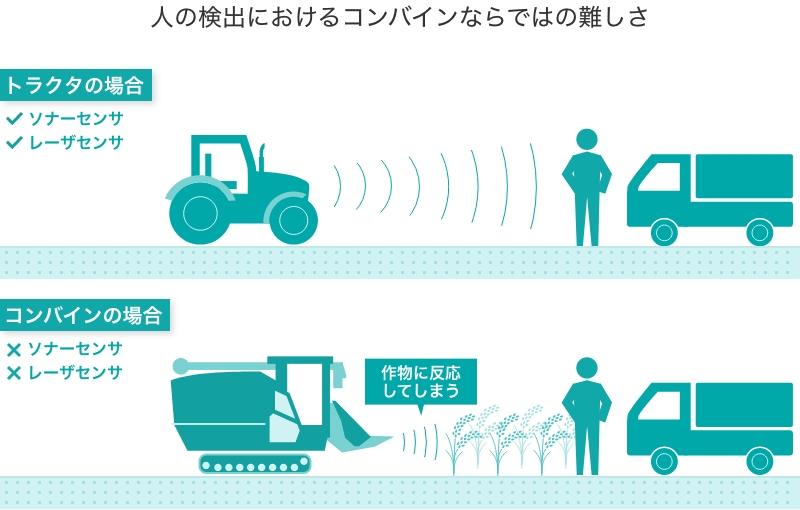
特に、作物と人・障害物を見分けるところにコンバインならではの難しさがあります。例えば、トラクタであれば、原則としてほ場には何もない状態なので、物体の位置を検出する「ソナーセンサ」や「レーザセンサ」で人と障害物を見分けることができました。しかし、刈り取り作業を行うコンバインは、ほ場に作物があることが前提となります。そのため、「ミリ波レーダ」や「レーザセンサ」だけでは作物にも反応してしまい、人と障害物を正確に検出することができません。
「作物か? 人か? 障害物か?」これらをコンバインで見分けるために、従来のセンサーに加え、カメラで画像を取得し、画像認識で人を見分ける「AIカメラ」を用いた検出技術の開発に着手。熟練者の判断の自動化を試みました。

地道な積み重ねで答えを導き出す。クボタならではの開発アプローチ
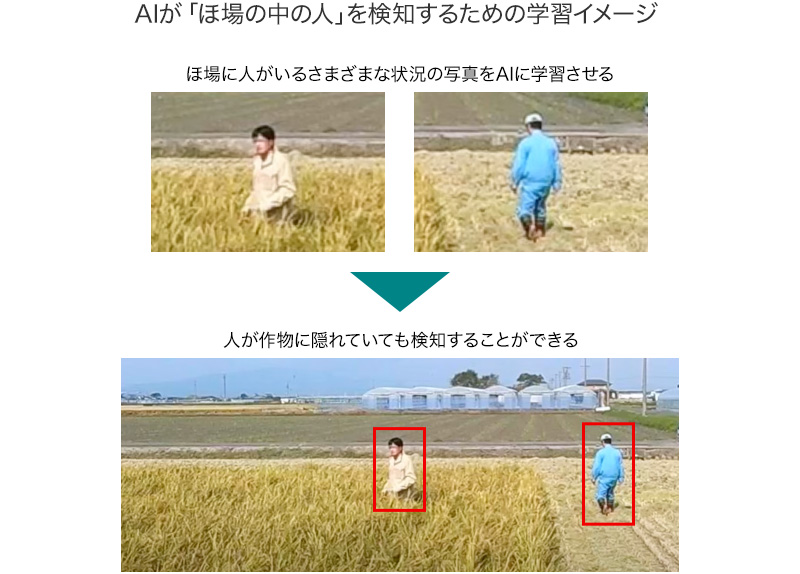
カメラで取得した画像から人を見分けるためには、AIにデータ学習させる必要があります。しかし、ここにもコンバインならではの難しさがありました。学習には「ほ場に人が立ち入っている写真」が必要ですが、そもそもそのような状況のサンプルはほとんどありませんでした。また、トラクタや田植機と違い、コンバインが稼働するのは作物の刈り取り時期。育った作物の中に人が入り込んでいる写真が必要です。
さらに、その人が何色のどのような服装をしているのか、などの細かい部分まで突き詰めると、「ほ場の中の人」の識別は単に「道を歩いている人の識別」とは比べ物にならないくらいの膨大なサンプル数が求められます。そこでクボタはさまざまな地域のほ場に足を運び、ほ場に人がいるあらゆるパターンの写真を独自に撮影。期間は3~4年にも及び、最終的に数百万点のサンプルを集めました。
開発者自らが現場に赴き、現場で得たことを開発に活かす。現場主義を大事にするクボタならではの開発アプローチでこの難題に地道に取り組み、ほ場内の人をコンバインに識別させることができるようになりました。
-
-

機体の各所に取り付けられた各種センサー。AIカメラ、ミリ波レーダ、レーザセンサそれぞれの特性を活かし、連携して「人と作物と障害物」を見分ける。
熟練者の技を現場で徹底分析。無人化・自動化で従来の技術が進化
熟練者と同じレベルで作業を効率化する際にもうひとつ課題となったのが、刈り取り作業です。熟練者と同等の作業をするには効率よくほ場を移動して刈り取ること、倒伏した作物の高さに合わせて機体を自動的に制御することが求められました。
クボタには「匠刈り」という技術がすでにあります。ほ場の外周を2~3周刈り取るだけでコンバインが最適なルートを作成し、刈り取りする技術です。
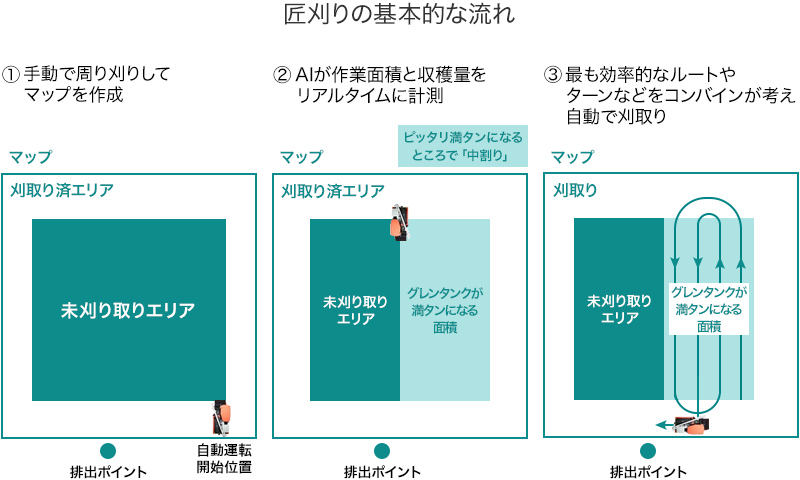
その際、最初に有人運転で行う周囲刈りをどこまで自動化・無人化できるかというのが今回のテーマでした。その際、大きな課題となったのが「隅刈り」です。隅刈りとは、自動運転を始める前に、コンバインが旋回するスペースを確保するため、ほ場の角部において斜めに刈り取る作業のことです。
コンバインの旋回スペースを確保するために、ほ場の周囲を刈り取る「隅刈り」。これまでは有人運転で2~3周程度刈り取る必要があった。
この隅刈りをどこまで無人化・自動化できるかを検討するために、その工程を細かく分析。開発者が現場に足繁く通い、熟練者の作業を注意深く観察することで、ほ場の「あぜ」の高さや状況を見て、機体をあぜの上を通過させて隅刈りを行い、作業の効率化を図っていることがわかりました。
-

熟練者は機体をあぜの上ギリギリまで通過させながら隅刈りを行う。
この熟練者の作業を自動化するにはあぜの高さや状態を正確に検知する必要があります。そこで、レーザセンサを用いた点群解析によるマップ作製機能を組み合わせることで、周辺状況を正確に検知する機能を開発。障害物やあぜを回避しながら自動運転しつつ、隅刈りの際にはコンバインが動ける範囲を拡大することで、熟練者と同じレベルでの隅刈り自動化に成功したのです。この自動化によって従来のコンバインと比較して自動運転領域が大幅に向上し、省人化・省力化を大きく進めることができました。
-
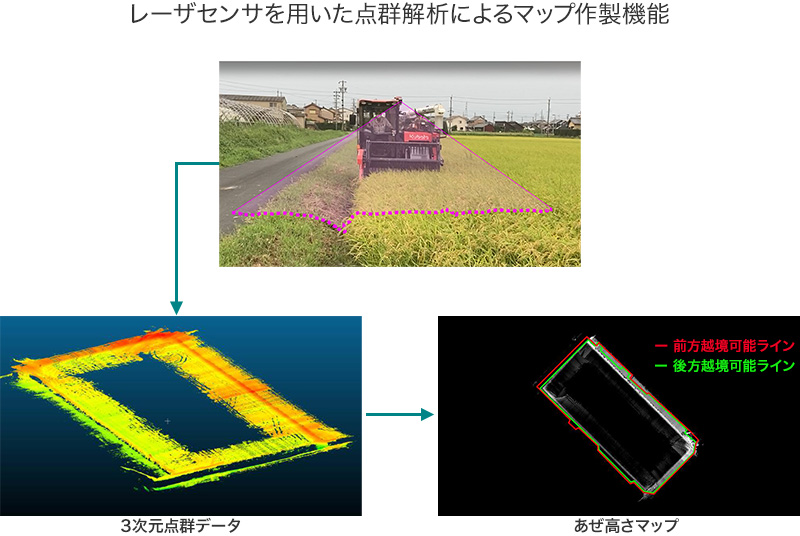
レーザセンサであぜと障害物の状態を検知。物体の密度を見分けることで、あぜと障害物かを見分けている。
「熟練者の経験」を数値化して匠の技を再現
熟練者ならではの技術としてもうひとつ、作物の状態に合わせた刈り取りがあります。作物は種類によって高さが異なり、時には倒れているなどその状態も一定ではありません。熟練者は複合的な感覚と経験則で機械を調節しながら、作物に合わせて刈り取り作業を行います。それを機械が自動で実行するためには「作物の高さの検出」と「高さに合わせた機体の制御」を数値化し、あらゆる状況をカバーできるパラメータのパターンを模索する作業が必要でした。
-
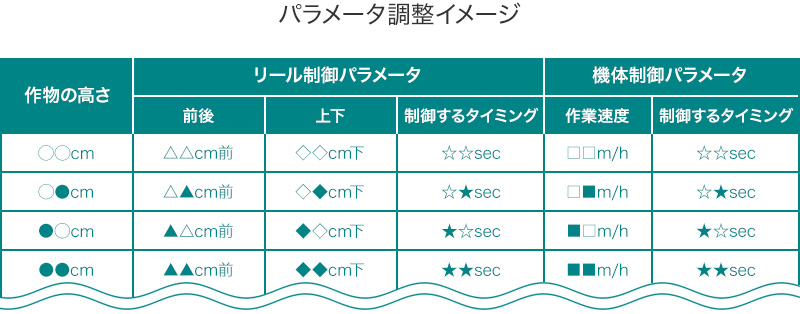
パラメータの調整イメージ。自動化するためには作物の高さや状況によって細かく設定する必要がある。
そこでクボタは、年に一度の収穫時期に合わせて日本列島の南から北へ向かって各地のほ場をまわり、熟練者の刈り取りに密着。作物のボリューム、密度、傾きなどの現状に合わせて熟練者が微妙に変える手法を探るべく、作物の高さ、機体の速度、リールの前後上下の位置、回転数などのデータを取得。推論、仮定、確認を繰り返し、できるだけ多くの状況をカバーできるパラメータを導き出し、作物の倒れた角度が60度までであれば、自動で刈り取ることを可能にしました。
作物の状態を検知して刈り取り部の高さや車速などを自動で制御。
新たな挑戦を支えた現場主義と自由闊達な開発体制
今回の開発プロジェクトは、課題を肌で感じるために開発者自身が現場に足を運ぶクボタの現場主義、そしてそれぞれの専門分野のメンバーがアイデアを出し合い、チャレンジできる環境が開発に十分に活かされたと考えています。特に、農業機械にAIを導入するのはクボタとしても初の試みで、社内の知見は十分ではありませんでした。しかし、AI構築やセンサー専門のメンバーが連携して自由にアイデアを出し、チーム内で気軽に相談し合える風通しの良い開発体制によって、AIによる画像診断などの新しい試みの実現につながりました。
クボタは農業機械の開発研究に携わる担当者本人が、農業の現場に足を運び、現場の本当のニーズを考え抜く現場主義の開発を大事にしています。さらに、地道なトライ&エラー、未知のものへのチャレンジを許容するクボタの風土によって、世界初となる無人自動運転コンバインを世に送りだすことができました。

この製品によって、クボタはトラクタ、田植機、コンバインの無人自動運転を実現しました。しかし、クボタが考える農業の完全無人化、そしてその先にある持続可能な農業を実現するにはまだ道半ば。越えなければならない壁がいくつもあります。クボタはこれからも現場主義と自由闊達な開発体制で、農業の未来に貢献していきます。