NEWS
未来農業 産学対談(前編)
北海道大学 野口教授 × クボタ 飯田特別技術顧問農業の未来を切り開くスマート農業 その歩み、その展望
2019 . 05 . 31 / Fri
文・写真=クボタプレス編集部
前編:自動運転農機のはじまりとこれまで
クボタが今、力を入れているICTを活用したスマート農業の研究は、アカデミックの世界でも長く続けられてきました。産学それぞれ協力しながら、より安全で効率のよい農業のあり方を模索することは、日本、そして海外も含めた農業の未来にとって不可欠です。
そこで、まだ記憶にも新しいドラマ「下町ロケット」の技術監修をされ自動運転農機研究の第一人者である北海道大学農学研究院 野口伸教授を訪ね、クボタでスマート農業の研究を牽引してきた特別技術顧問 飯田聡とともに、これまでのスマート農業の歩みと、今後の展望について語っていただきました。
今回は全二回の前編となる「自動運転農機のはじまりとこれまで」をお届けいたします。
■対談者プロフィール■
野口 伸(のぐち のぼる)

北海道大学大学院農学研究院 副研究院長・教授
1961年北海道生まれ。北海道大学大学院農学研究科博士課程修了(農学博士)。 北海道大学助手、助教授を経て、2004年より現職。現在、日本生物環境工学会理事長、日本農業工学会副会長。内閣府SIP「スマートバイオ産業・農業基盤技術」PD代理。専門は農業ロボット、スマート農業。
飯田 聡(いいだ さとし)

株式会社クボタ 特別技術顧問 工学博士(2019年5月現在)
1980年久保田鉄工(現株式会社クボタ)に入社し、トラクタ技術部第二開発室長、建設機械技術部長、建設機械事業部長、クボタヨーロッパS.A.S.(フランス)社長、クボタトラクターCorp.(アメリカ)社長、機械海外本部長、農業機械総合事業部長、研究開発本部長、取締役専務執行役員を経て、2018年より特別技術顧問。
1.自動運転農機研究のきっかけ
「新しいこと」をしながら「世の中のためになること」を
――はじめに、ご専門の農業工学を学ぼうと思ったきっかけを教えていただけますでしょうか。
野口先生(以下、野口):
私は、北海道生まれ、山口県育ちなのですが、北海道に憧れがありましてね。大学くらい北海道に行きたいと思っていました。北海道大学となると農学部が看板だったのと、物理数学が得意だったので、農学部の農業工学に進みました。
まだ世の中にまったくない「何か新しいもの」を作りたい、同時に自分の生き方として、「世の中のためになりたい」という意識がとてもあり、その気持ちは今でも強く持っています。
――その中で、なぜ自動運転農機の開発に関わることとなったのですか。
野口:
もともとは機械系が専門で、当時エネルギー問題が社会課題だったこともあり、博士まではトラクタをアルコールエンジンで動かす研究などを行っていました。一方で、今ほど顕在化していなかったものの、農業従事者はすでに減少傾向にあり、労働力不足の課題が見えていたのです。何か「新しいこと、世の中のためになるようなこと」と考えたときに、自動運転農機の研究は将来の日本および世界の農業に少しは役に立つかなと思い、自動走行や農業の自動化の研究を進めるようになりました。

――飯田顧問(以下、飯田)はトラクタの研究をされていたとうかがっています。
飯田:
私は1980年にクボタに入社し、トラクタ技術部で強度信頼性解析やエンジンの粘り性能の解析などの基礎研究をやっていました。1990年前後からは、油圧制御系の性能を上げる新しい電子油圧システムの研究をしていました。その後大型トラクタの研究開発にうつったわけですが、その頃が一番面白くて、実機での性能試験のために北海道を含めて全国各地を回り、データを取り、台上でのシミュレーション化、モデル化を行いながら新しい油圧制御システムの開発を行っていました。農家の作業の実態を知るのに一番役立つ経験でしたね。
2.自動運転農機開発の歩み
1990年代にはすでに始まっていた自動走行研究
――日本において、自動運転農機は、どのように研究開発が始まったのでしょうか。
野口:
私は1991年くらいから研究を始めましたが、その頃、農業機械化研究所(現在の国立研究開発法人 農業・食品産業技術総合研究機構 農業技術革新工学研究センター)が自動走行、自動田植え、自動耕運ロボットの研究をやっていました。自動走行関連の研究をしている公的研究機関は、大学も含めて当時そこだけでしたね。彼らは、地磁気方位センサーを使った自動運転や、画像処理を使って耕うん跡を検出する研究もしていました。
――先生が着手された頃、すでに自動運転の研究に取り組んでいるところがあったのですね。
野口:
我々は後発だったので、「まずは先行研究のところまで追いつかなければいけない」ということで、交流研究員として、大学と同研究所の間を行ったり来たりしながら勉強していました。その一方で、車両の運動モデルをコンピュータでシミュレーションする研究も行なっていました。
その2本立てで進めていたところ、幸いなことに「耕うんロボット」という国のプロジェクトがスタートし、それがクボタとの出会いでした。
クボタと日本航空電子工業と生研支援センター(現在の国立研究開発法人 農業・食品産業技術総合研究機構 生物系特定産業技術研究支援センター)が参画したこの開発プロジェクトでは、初めて実際のトラクタをベースにした無人化ロボットの研究に着手できたのです。位置測定に、電磁誘導、GPS、光学測量という3つの方式を試した自動化・ロボット化の研究は、実用レベルにはいたらなかったのですが、後々役立っていきます。実機はクボタのGL320がベースとなっており、実際に使われている製品で開発できたことは非常によかったですね。

シミュレーションから実機での検証がブレイクスルーに
――コンピュータシミュレーションではなく、実機で検証できたことは、大きなポイントでしたか?
野口:
シミュレーション上で動いたと言っても説得力がないですから、本当に動かすということはとても重要です。実際の機械を自動化して運転できたというのは、我々の研究にとってひとつのブレイクスルーでした。
面白いことに、1997年にアメリカへ留学した頃、自動運転は世界であまり研究されていませんでした。「耕うんロボット」プロジェクトを一緒にやっていた生研支援センターの人が、世界で一番大きい学会であるアメリカの農業工学会で自動運転について発表した時、ふつうは動画に続く質疑の後で拍手なのに、動画が終わった瞬間に拍手が起こったのです。それほどインパクトがあったのでしょう。当時アメリカでは、カーネギーメロン大学の牧草を自動で収穫するハーベスターが有名でしたが、日本のトラクタが自動運転まで実現したので驚嘆していました。
クボタの自動化研究のあゆみとその本格化
――そのころのクボタはどのようなことに取り組まれていたのでしょうか。
飯田:
私が入社した1980年頃、クボタは自動化研究を始めていました。1981年くらいに芝刈り機をベースに、無人走行関連の研究をしており、これは後にラジコン芝刈り機になりました。地磁気方位センサーとカメラで未耕地、耕地を識別して誘導したのです。また、いち早くみかん収穫ロボットの研究も行っていました。1990年代に入ると苗の補給も含む無人田植え機の研究に取り組んでいましたね。野口先生と取り組んだ耕うんロボットもこの頃です。
この80年代から90年代は、だんだん農村に人がいなくなるという危機感も含めて、省力化、省人化、無人化がテーマになってきました。1998年からは、NEDO(通産省管轄の国立研究開発法人新エネルギー・産業技術総合開発機構)の地域新生コンソーシアム研究開発事業*1にも参加しました。MD77とGL320というトラクタは、クボタが野口先生のところで一緒に研究をやっていた頃の思い出の機械です。
野口:
GL320では、GPSを少し使いましたが、MD77から初めてRTK(Real Time Kinematic*2)を使って動かしました。本当にこれは画期的でしたね。
飯田:
その頃、私は別のグループで、無人運転ではなく、トラクタの作業効率向上と操作容易化のため、作業機の耕深制御や水平制御などの新しい電子油圧システムの開発に取り組んでいました。当時の研究は現在のコンバインや田植え機のさまざまな制御にもいかされています。
残念ながら、2000年代に入ると、クボタの自動化・無人化の歴史はしばらく途切れてしまうのです。当時の技術では、位置の精度とマイコンの能力や通信技術が不十分で、事業化が難しかった。また想定価格も高く、農村でそこまでお金出して、省人化に対して手を打とうという人がいなかったのです。当時はまだ労働力不足がそこまで切迫していなかったのでしょうね。
- *1.地域において新産業・新事業の創出を図るため、大学等の技術シーズや知見を活用した産学官の共同研究体制の下で、実用化に向けた高度な研究開発を行う取り組み。
- *2.汎地球測位航法衛星システムのひとつ、GPSと組み合わせて使用することによって、より高精度の位置情報を計測することができる。
――そういった状況を経て、現在クボタは自動運転農機を続々と発売しています。本腰をいれてスマート化に取り組もうとしたのはいつ頃なのでしょうか。

飯田:
それが2010年になると、世の中の変化を受けてデータ農業をやらねばとなり、KSAS*3のベースとなる取り組みが始まりました。そして、食味収量センサーや通信、GPSの研究を全社プロジェクトとしたのが2012年。KSAS先行開発プロジェクトの始まりでした。
野口:
飯田さんはどういう立場だったのですか?
飯田:
私は2004~2008年までフランスに、2009~2010年までアメリカに駐在し、欧米の畑作市場への参入を目指してきました。2012年から農機総合事業部長となり、欧米で普及し始めた精密農業に対応し、日本農業に適した日本型の精密農業システムの必要性を強く感じ、KSAS先行開発プロジェクトを強化してきました。その結果、2014年にKSASと食味収量コンバインを発売しました。そして、2014年から研究開発本部長としてこれまで縦割りで進められていた自動化・無人化の研究を横通しして全社プロジェクトとして組織化したのが、GPS農機開発プロジェクトでした。以前と違い、農村の人口減少という待ったなしの状況があり、クボタも早く技術的に追いつかなければと、開発に力を入れました。また、時を同じくして、2013年6月に内閣府から発表された科学技術イノベーション戦略は、エポックメイキングでしたね。行政としてもスマート農業に力を入れないといけないと打ち出されたものでした。
野口:
その後の2013年10月に農水省でスマート農業研究会が立ち上がったことを考えると、これがスマート農業の1つのベースであり、後の戦略的イノベーションプログラム(以下SIP)*4に繋がっていきましたね。
飯田:
その2013年ぐらい北大にお邪魔して、自動運転のアシストプロというプロジェクトに取り組んでいた野口先生にお会いして、一緒に何かやりませんかとうかがいました。そこから田植え機を中心に取り組ませていただき、レベル1の直進キープ機能付き田植え機、そしてオートステア機に至り、最終的には現在のレベル2のアグリロボトラクタ*5に繋がっています。
- *3.KSAS(クボタ スマートアグリシステム)は、農業機械とICTを利用して作業・作物情報(食味・収量)を収集し活用することで、「儲かるPDCA型農業」を実現する営農・サービス支援システム
- *4.総合科学技術・イノベーション会議が司令塔機能を発揮し、府省の枠を超え、基礎研究から実用化・事業化まで一気通貫で研究開発を推進し、イノベーションの実現を目指すプログラム。
- *5.クボタで開発した、KSAS対応の自動運転トラクタ・田植機・コンバインの農機シリーズ。
農家の声がきっかけとなって、急展開していった自動運転農機の研究
――先生が取り組まれていたアシストプロで力点を置いていたのは、どういったところでしたか。
野口:
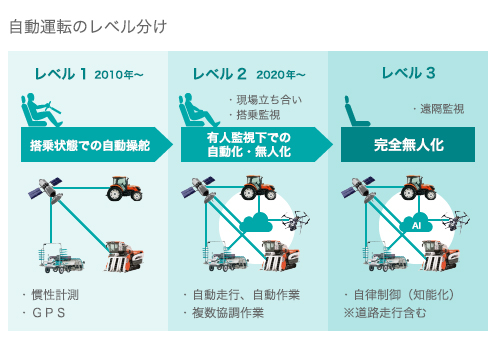
アシストプロは、今SIPでやっている無人化・自動化の研究のベースになる研究でした。有人機と無人機の2台の農機が協調して作業する協調型システムというのはアシストプロで開発したのです。農家の方たちが出した協調運転というアイデアが、安全性を担保するのに非常に有効なので、実際に設計会議で話をしてもらったところ、同席していた農水省も、これだったら実用化できそうだということになりました。それを後押しする科学技術イノベーション総合戦略が出ていたこともあって、農水省の人も実現に向けて動いてくれました。アシストプロから生まれた協調型システムは、この後、レベル2に指定されていきます。
飯田:
レベル1とレベル2の区分け、そしてアシストプロから生まれたレベル2が協調運転を含むという概念には大きな影響を受けました。そこからクボタも事業化を目指して、相当力を入れるようになったのです。いろいろな国のプロジェクトに参加させていただいたことが、概念の構築にとても役に立ちました。
野口:
そういう実証実験に入っていきながら作り上げていく御社の力は、すごいですよね。
3.自動運転農機の実現に向けての課題
開発の過程において越えなければならなかった5つの「壁」
――自動運転開発において、クボタの中の技術開発ではどのようなことが課題になりましたか。
飯田:
開発は短期間で行ってきましたので結構難しく、たくさん課題もありました。2020年には完全無人化を、2018年ぐらいにはレベル2を実現しようとスタートしましたが、社内でその1年前にレベル2を出そうということになり、超短期開発となりました。
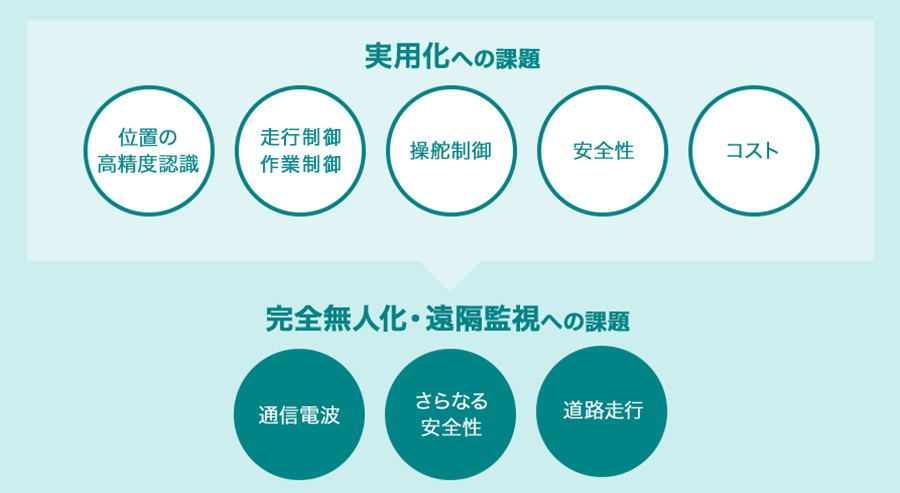
開発の過程においては、越えなければいけない「壁」が5つありました。1つめは位置の高精度認識。RTKのGNSS(全球測位衛星システム)を当初2周波でやっていたのを、コストを意識して1周波にし、内作化に取り組みました。2つめは走行制御と作業制御です。多角形認識という圃場地理情報の取り方と、最適ルートを導くアルゴリズムの決定ですね。作業の自動制御については長い蓄積があるので、わりと問題なくできました。一番難しかったのは、3つめの操舵制御でした。GNSSの位置情報だけでなく、IMU(慣性計測装置)の情報、それからスリップの情報を加味して我々独自の制御方式を開発しました。
自動運転農機の実用化および完全無人化に向けての課題
野口:
路面環境は圃場によって変わりますから、滑り特性が変わります。雪の上ではまた状況が違いますし、圃場では凹凸もあります。それでも常に同じ精度が要求されるというのは、車ではありえない要件であり、自動運転農機ならではの難しさですよね。
飯田:
4つめは安全です。どこまでやればいいのかという見極めが大変でした。農水省のスマート農業研究会で安全ガイドラインの策定が進められていましたが、欧州で制定中のISO規格も考慮し、カメラ・レーザー・ソナーといったセンサーを組み合わせてその対応を図りました。実作業においては当初、ホコリだとかぺんぺん草を検知しても止まっていたし、雨の中はどうするんだとか、安全機能の確保に非常に苦労しました。

野口:
安全性をどこまで農機側で確保すべきか、非常に難しい問題です。すべてを農機に任せたらコストがかかり、結果的に農家にとって手の届かないものになってしまう。
飯田:
5つめはそのコストです。どうやって下げるかというのが大きな課題であり、いまだに苦労していますが、GNSSの内製化や、自動車のセンサーを使うなどして日々取り組んでいます。こうして数々の壁をなんとかクリアしながら、機械を出すことができたので、今年は政府のスマート農業加速化実証プロジェクトなどを通じてその効果の検証をしていきたい。
野口:
クボタのようなグローバルカンパニーだと、数が出ますから、量産効果で安くしていくことも可能ですよね。
今後控える、電波と道路走行という技術テーマ
――有人監視下でのロボット農機の次は遠隔監視、そして完全無人に進んでいくことが期待されます。技術的にはどこが一番のテーマでしょうか。
野口:
遠隔監視をするためには、現場と監視側をつなぐ電波が大きな課題で、私は2種類の電波が必要だと思っています。1つは、人間の目視で何かあったらすぐ止める指示が出せる、非常に重要で安定性を持った専用電波。我々の持っているキャリアの電波では、混むとつながらなくなるので心配です。ペットの犬を連れて散歩に行ったとき、リードが切れたら危ないわけで、電波も切れると危ない。
もう1つは、作業の出来も含めた周辺画像を送れる電波。機械の作業の質が悪ければ、農家の人は使ってくれないので、機械がきちんと作業をしたのか判断をするため、かなりボリュームの大きいデータのやりとりが発生します。普通の電波は使えないので、今後導入が予定されている5Gにも期待したいですね。

飯田:
今、画像はWi-Fiで飛ばしていますが、150mが限界です。リモコンも150mくらいです。有人監視でもその程度なので、今後ここをできるだけ伸ばしたいですよね。
野口:
伸ばしたいですよ。今は狭すぎる。コントロールルームを置く遠隔監視ではなく、そばで作業させるにしても、もっと遠くまで届く電波でないと意味がない。ロボット農機をそこまで狭い畑で使うわけではないですから。
それから、位置決めのために基地局を自ら立てなきゃいけないというのもハードルが高い。
――今お話しにもあがりましたが、監視するための電波のほかに、農機の位置やマップを把握するための通信機器についてはどうでしょうか。
飯田:
そこは、基地局がいらない準天頂衛星に期待したいですね。誤差が5、6センチになると言われているが、どこまで農家に受け入れられるかの検証が必要。しかし北海道の農家などでは、播種などは精度高く2、3センチの精度でやりたいという声もあり、VRS方式(仮想基準点方式*6)への対応も進めています。
準天頂衛星については、今年受信機用のチップが量産化されるようですが、その性能を確認し、それが搭載されるとなると2020年以降でしょうか。
- *6.国土地理院から提供されている電子仮想基準点を元に、位置情報を把握する方式。
――ほかに何か技術的にテーマになりそうな点はありますか。
飯田:
レベル3では、道路走行を前提にする必要があります。センターラインのない農道で、農機が車とすれ違うという状況を考えると、安全確保が非常に難しいのです。農機専用の農道を確保したり、機械だけでなく農道を規格化してインフラ側でサポートする必要もあり、圃場内の基盤整備事業とあわせて、議論が必要です。

野口:
私は、圃場間の移動が課題になると思っています。圃場の間に1本公道があるとき、無人の自動運転では、法的にも技術的にも公道をまたぐことができないというのが、今の状況です。せっかくロボット農機を使っていても、公道を通るたびに人が乗って動かすのでは、効率が上がりません。農機置き場から畑へ、農道を無人で行くというのはまだ先の話かもしれないですが、農道をまたぐぐらいはできた方がよいと思います。
飯田:
クボタはまずレベル2の自動農機の普及を図りたいと考えていますが、このような課題が解決されれば、レベル3も定着する可能性はあると思います。
野口:
今私たちは、北海道岩見沢の遊水池という限られた環境下では実現しようとしていますけど、それを社会実装するとなると、かなり大きなハードルになる。ただ、その手前で一番問題になっていた道路運送車両法の問題が解決されて、作業機付きのトラクタが走れるようになりました。これが認められると道路をまたぐくらいはいつかできるようになる可能性はありますよね。
今回は自動運転農機の歩みや、農業機械の自動化の実現に向けた課題を語っていただきました。自動化技術の向上だけではなく、圃場や農道など自動運転農機を使うインフラの整備と合わせて進めることが欠かせないようです。今後、自動運転農機が世界中に広まる可能性をふまえると、これは日本だけでなく世界でも共通した課題となっていくのではないでしょうか。次回後編は、現在の農業の課題、未来の農業に必要なイノベーション、そして産学の役割について、おうかがいしていきます。

